Как сделать мосты для машинки на пульте

Запчасти для WPL B24
В этой статье мы на подробном примере расскажем о том, как построить настоящего робота целиком на инфракструктуре ROS — Robot Operating System. Это будет наш первый мобильный робот со своей операционной системой и первый опыт работы с ROS. Далее мы постараемся пошагово и как можно подробнее рассказать вам о процессе проектирования, конструирования и программирования робота, а также расскажем, с каким трудностями и проблемами мы столкнулись. Если вы сомневаетесь, что вам это подходит, повторите проект попроще, например робота для езды по линии.









Все звезды. Color: B B1. Цвет: B B1. Newset WPL B B36 RC Truck моделирование полноразмерный 6-колесный советский Уральский военный грузовик модель внедорожный автомобиль с дистанционным управлением. В версии RTR, поскольку цветная коробка слишком велика, мы будем использовать упаковку из пенопласта для защиты продукта. Скидка магазина.
- Step 1: Настраиваем ESP8266, Пишем Скетч На Arduino, Занимаемся Отладкой Этого Хозяйства.
- Сложно найти ребенка, который был бы равнодушен к радиоуправляемым игрушкам. Они доставляют столько эмоций, столько удовольствий от игры!
- Всем привет. Всё стандартно, управление дискретное и никуда не годное.
- Этот урок показывает как сделать радиоуправляемую модель машины, которую можно контролировать через смартфон. В этом руководстве мы будем использовать плату Arduino Uno.




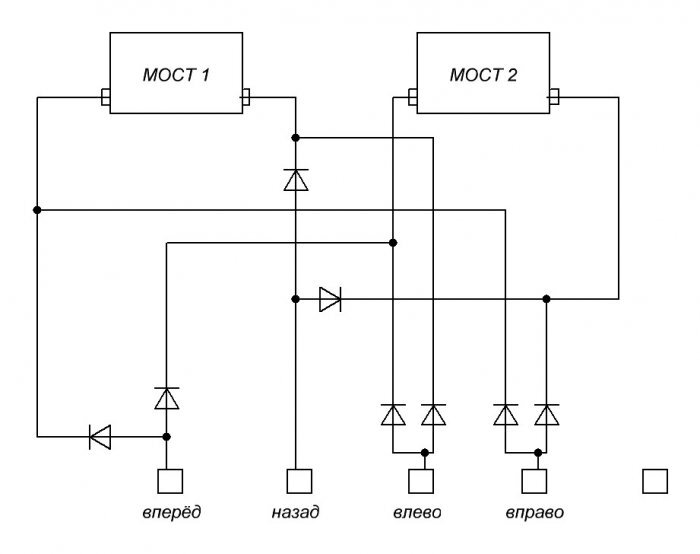






Драйвер LN используется радиолюбителями для многофункционального управления двигателями постоянного тока. Схема модуля, состоящая из двух H-мостов, позволяет подключать к нему один биполярный шаговый двигатель или одновременно два щёточных двигателя постоянного тока. При этом есть возможность изменять скорость и направление вращения моторов. Управление осуществляется путём подачи соответствующих сигналов на командные входы, выполненные в виде штыревых контактов. База знаний.






